
本文阅读的版本是tensorflow对SSD的实现,相对而言阅读难度要远低于caffe版本的实现,源代码可见balancap/SSD-Tensorflow。
一、思路
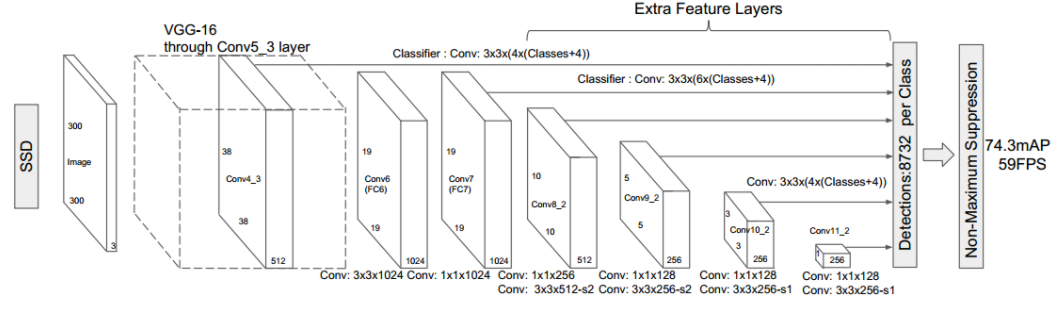
SSD的网络结构在论文中清晰可见,如图所示。具体是使用了VGG的基础结构,保留了前五层,将fc6和fc7改为了带孔卷积层,而且去掉了池化层和dropout,在不增加参数的条件下指数级扩大了感受野,而且没有因为池化导致丢失太多的信息;后面再额外增加了3个卷积层和一个average pooling层,目的是使用不同层的feature map来检测不同尺度的物体。之后从前面的卷积层中提取了conv4_3,从后面新增的卷积层中提取了conv7,conv8_2,conv9_2,conv10_2,conv11_2来作为检测使用的特征图,在这些不同尺度特征图上提取不同数目的default boxes,对其进行分类和边框回归得到物体框和类别,最后进行nms来进行筛选。简而言之,SSD预测的目标就是以一张图中的所有提取出的anchor boxes为窗口,检测其中是否有物体,如果有,预测它的类别并对其位置进行精修,没有物体则将其分类为背景。
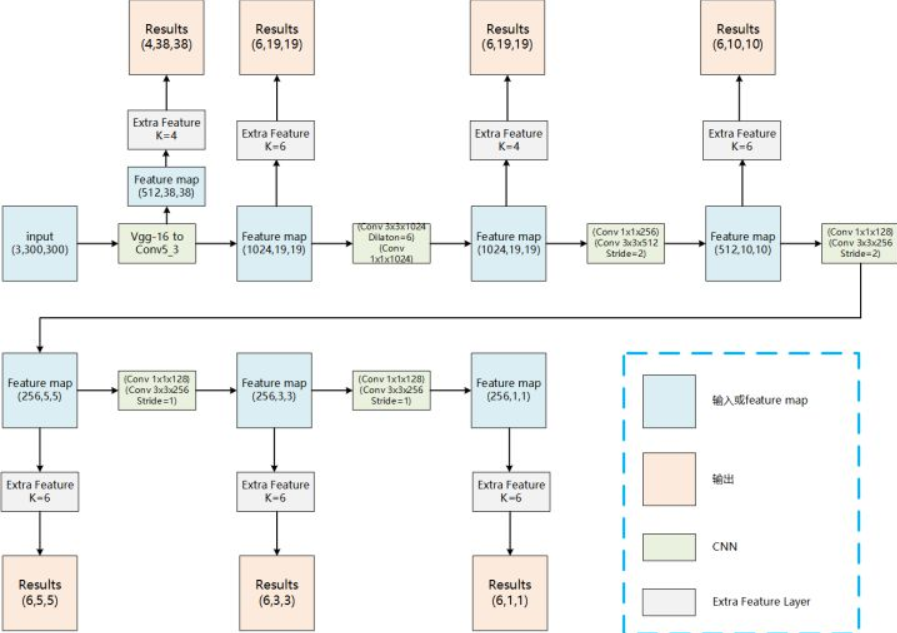
通俗一点的思路如下面的两个图所示,SSD所做的其实就是将feature map用额外的两个卷积层去卷积得到分类评分和边框回归的偏移,其中k表示从该层feature的每个anchor处提取的不同default boxes的个数,这些词具体是什么可以在后面的代码细节中看到。其他的一些细节,例如数据增广,mining hard examples等,也都在代码中有体现。
下面是提取结果的卷积层的放大图。
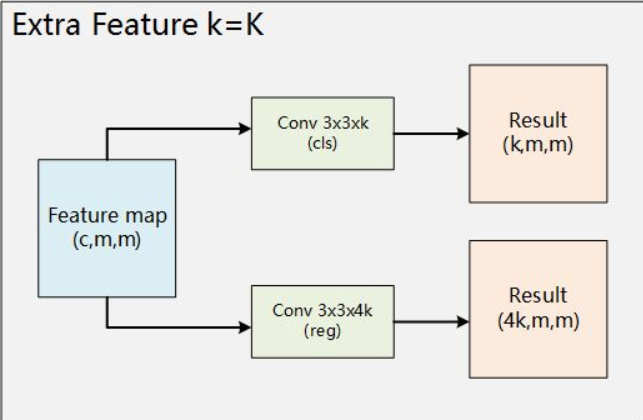
每个feature map可以分两条路,分别得到分类结果和回归结果,再通过已有的ground truth box及其类别得到每个default box的分类和边框偏移,就可以计算loss,进行训练了。
二、default boxes提取
default boxes的选取与faster rcnn中的anchor有一些类似,就是按照不同的scale和ratio生成k个boxes,看下面的图就能大概了解其思想
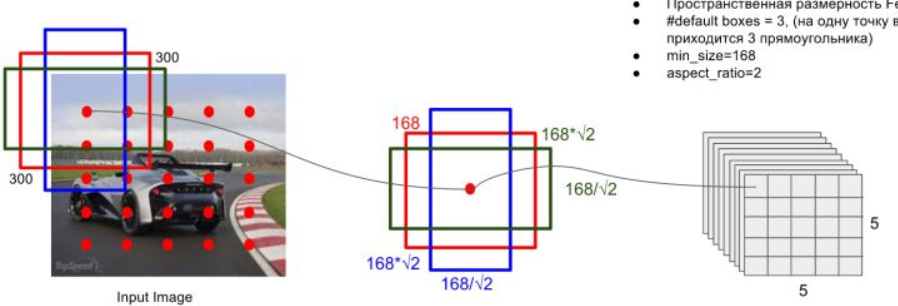
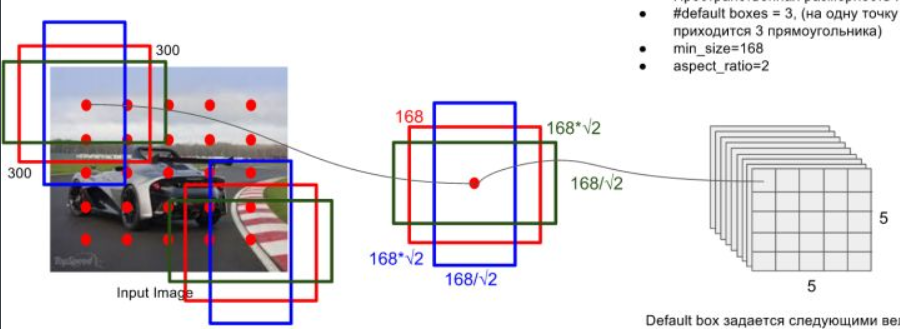
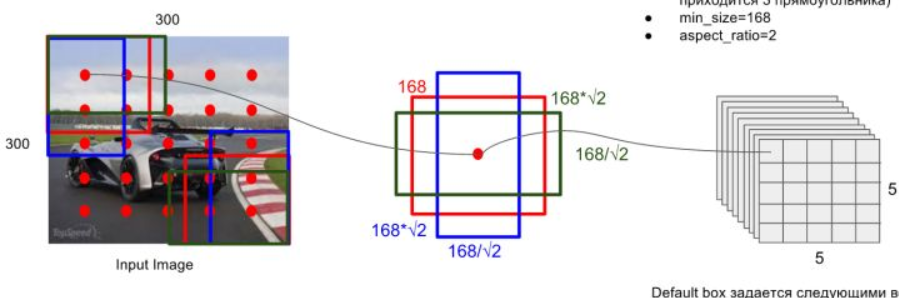
scale:scale指的是所检测的框的大小相对于原图的比例。比例低的可以框出图中的小物体,比例高的可以框出图中的大物体。深层次的feature map适合检测大物体,所以此处使用了一个线性关系来设置各个feature map所检测的scale。公式如下
其中m是特征图的个数,实际取的时候为5,因为conv4_3层是单独设置的大小。$s_k$是第k个特征图的scale,$s_{min}$和$s_{max}$表示scale的最小值和最大值,在原论文中分别取0.2和0.9,而第一个特征图的scale一般设为$s_{min}$的一半,为0.1,所以对于300$\times$300的图片,最小的比例为300*0.1=30,之后每个对应feature map所检测的default boxes的大小都是300*$s_k$。在caffe源码中的计算是先给出了$s_k$的增长步长,也就是$\displaystyle \lfloor\frac{\lfloor s_{max}\times100\rfloor-\lfloor s_{min}\times100\rfloor}{m-1}\rfloor=17$,由此可以得到5个值分别为20,37,54,71,88(后面还会得到另一个虚拟值是88+17=105)。这些比例乘图片大小再除以100,就能得到各个特征图的大小分别为60,111,162,213,264。再结合最小比例,可以得到default boxes的实际尺度分别为30,60,111,162,213,264。
aspect ratio:aspect ratio指的是default boxes的横纵比,一般有$\displaystyle a_r \in \{1,2,3,\frac{1}{2},\frac{1}{3}\}$,对于特定的横纵比,会使用
来计算真正的宽度和高度(此处$s_k$也是指真实的大小,也就是上文中的30,60,111,…)。默认情况下,每个特征图会有一个$a_r=1$的default box,除此之外还会设置一个$s_k^{\ ‘}=\sqrt{s_k s_{k+1}}$,$a_r=1$的default box,也就是说每个特征图中都会设置两个大小不同的正方形的default box,此处最后一个特征图就需要用到之前的虚拟值105(对应的实际尺度是315)。然而在实现时,使用的比例是可以自己选择的,理论上每个feature map都应该有6个default boxes,但是实际实现中某些层只使用了4个default box,没有使用长宽比为$3$和$\frac{1}{3}$的default box。
default box中心:default box的中心在计算的时候需要恢复为原图的相对坐标,所以每个中心设置为$\displaystyle\left(\frac{i+0.5}{|f_k|},\frac{j+0.5}{|f_k|}\right)\ \ i,j \in [0, |f_k|)$,其中$|f_k|$表示第k个feature map的大小。
综上可以得到如下表格
| feature map | feature map size | min_size($\textbf{s}_\textbf{k}$) | max_size($\textbf{s}_\textbf{k+1}$) | aspect_ratio | step |
|---|---|---|---|---|---|
| conv4_3 | 38$\times$38 | 30 | 60 | 1,2,$\frac{1}{2}$ | 8 |
| conv7 | 19$\times$19 | 60 | 111 | 1,2,3,$\frac{1}{2}$,$\frac{1}{3}$ | 16 |
| conv8_2 | 10$\times$10 | 111 | 162 | 1,2,3,$\frac{1}{2}$,$\frac{1}{3}$ | 32 |
| conv9_2 | 5$\times$5 | 162 | 213 | 1,2,3,$\frac{1}{2}$,$\frac{1}{3}$ | 64 |
| conv10_2 | 3$\times$3 | 213 | 264 | 1,2,$\frac{1}{2}$ | 100 |
| conv11_2 | 1$\times$1 | 264 | 315 | 1,2,$\frac{1}{2}$ | 300 |
以上所有的内容在源码中都是有对应的体现的,首先看关于default box的一些设置,代码在ssd_vgg_300.py。
|
|
其中img_shape代表输入图片的大小;num_classes代表输入的类别(20+1个背景类);feat_layers代表提取的层;feat_shapes代表各个提取的featrue map的大小;anchor_size_bounds代表前文所说的$s_k$(原论文中取0.2到0.9);anchor_sizes保存的是各层提取的default boxes的大小,也就是上面说的实际尺度;anchor_ratios是前面所说的各层的default boxes的横纵比;anchor_steps指的实际是default box的中心点坐标映射回原图的比例,做法就是用中心点坐标乘以对应的step;anchor_offset对应前文的offset;其余变量暂时与default boxes的生成无关。
整个训练过程都在train_ssd_network.py中,从这个文件中可以看出,第一步anchors的获取是通过ssd_anchors = ssd_net.anchors(ssd_shape)这句代码来获取的,而ssd_net这个对象是经由一个工厂类生成的一个网络类,此处以ssd_vgg_300为例,可以当作ssd_net就是一个ssd_vgg_300.py中定义的SSDNet的实例。这个被调用的函数可以在ssd_vgg_300.py中找到。而这个函数也只有一句话,那就是
|
|
ssd_anchors_all_layers在该文件中的后半部分定义,只有几句话:
|
|
可以看出,它是一层一层获取default box,再添加到列表中,此处使用了获取一层default box的函数,代码如下:
|
|
代码结合上面的讲解很好理解,通过上述的步骤,就得到了所有层的default box的y,x,h,w。举例来说,对于第一个特征图而言,y,x,h,w,的shape分别为(38,38,1),(38,38,1),(4, ),(4, )。
三、Bboxes Encode
要想理解这部分,需要知道什么是边框回归,此处有一个很好的讲解博客: 边框回归详解 。知道了什么是边框回归,也就能理解我们这一步要干什么,主要有两个任务:1.给每个default box找到其对应的ground truth box,顺带得到其类别和得分。2.计算其相对于对应的ground truth box的变换,也就是边框回归要得到的目标变换。显然,这两步正是相当于给default boxes打上label的过程,对应之前说过的分类任务和回归任务。
在train的过程中只用一句话得到了每个default box的分类,边框偏移以及得分(用IOU定义,与GT box的IOU越大,得分越高),如下所示:
|
|
这个函数同样在ssd_vgg_300.py,源码是
|
|
可以看出,结果是通过一个叫tf_ssd_bboxes_encode的函数获得的,其定义于ssd_common.py,如下所示
|
|
可以看出,类似于anchors的获得,default box的标定也是先一个特征图一个特征图进行,之后再将一个特征图的结果分别放入对应列表中。下面来看每个特征图是如何处理的,处理一个特征图的函数是tf_ssd_bboxes_encode_layer,源码见下面
|
|
这个函数比较长,先看第一个函数之前的部分,首先是通过之前得到的一层特征图的y,x,h,w,计算每个default box的四个角的坐标及面积(此处利用了numpy的广播机制),随后初始化了一些空的tensor:类别标签、得分以及每个default box对应的GT box的四个角的坐标。shape也都符合之前的定义,此处以第一个特征图为例,其大小为38$\times$38,每个中心点对应4个default box,每个default box对应一个label,一个GT box和一个得分,所以所有初始化tensor的shape都是(38,38,4)。
下面是几个辅助函数,jaccard_with_anchors(bbox)用于计算bbox与所有default box的IOU;intersection_with_anchors(bbox)用于计算bbox与所有default box的交比上default box的面积的值,在此处没有用到这个函数;condition,body要和下面的tf.while_loop连起来看,tf.while_loop的执行逻辑是,若condition为真,执行body,condition只有一句话,其实就是判断i的值是否小于GT box的数目,也就是说整个循环逻辑是以每个GT box为单位进行的,body就是对每个GT box进行的操作。
在看body具体做了什么之前,需要先了解SSD中GT box的匹配机制。共有两个原则,第一个原则是每个GT box与其IOU最大的defaut box匹配,这样就能保证每个GT box都有一个与其匹配的default box。但是这样的话正负样本严重不平衡,因此还需要第二个原则,那就是对于未匹配的default box,若与某个GT box的IOU大于一个阈值(SSD中取0.5),那么也将其进行匹配,此处有一个问题就是若某个default box与几个GT box的IOU都大于阈值,选哪个与其匹配?显然,选与其IOU最大的那个GT box与之匹配。这样就大大增加了正样本的个数。还会有一个矛盾在于,假如一个GT box 1与其IOU最大的default box小于阈值,而该default box与某一个GT box 2的IOU大于阈值,如何选择。此处应该按照第一个原则,选择GT box 1,因为必须要保证每个GT box要有一个default box与之匹配。(实际情况中该矛盾发生可能较低,所以该tensorflow实现中仅实施了第二个原则。)
下面可以看一下body函数,可以看出,它的逻辑是使用某个GT box与所有default box的已经匹配的GT box的结果去比较,再决定是否更换每个default box对应的GT box。函数中出现了很多mask*A + (1-mask)*B的模式,mask的值只有0和1两种,那么这句话的意义就很显然了,如果mask为1,新值为A,否则为B,对应到具体情况中就是mask为1则更换对应GT box,为0则保持不变,那么决定是否更换的mask的值则来自于前面的条件判断,条件判断如下
|
|
此处更改了之前的逻辑,将大于阈值的部分去掉,改为只要大于之前的IOU,就进行GT box的匹配。
找到了所有default box对应的GT box的四个角的坐标,就可以开始进行边框偏移的计算,在SSD中此处有一个技巧,假设已知default box的位置$\boldsymbol{d=(d^{cx},d^{cy},d^w,d^h)}$,以及它对应的GT box的位置$\boldsymbol{b=(b^{cx},b^{cy},b^w,b^h)}$,通常的边框偏移是按照如下方式计算的
这个过程称为编码(encode),对应的解码(decode)过程则为
但是在SSD中设置了variance来调整对t的放缩,无论在解码还是编码时都会使用variance来控制,此时编码过程计算如下
解码过程如下
variance可以选择训练得到还是手动设定,在SSD中选择手动设定,这也就是SSDParams中parior_scaling中四个数的含义,其实就是对应的variance。
四、网络结构
除了对数据的预处理,以及并行化处理意外,接下来就是将数据喂进网络,得到每个default box的分类结果和边框偏移。接着看train_ssd_network.py,可以看到这样一句代码:
|
|
它调用了net函数,返回了四个变量,为了清楚这个函数做了什么,提前说明四个变量的含义:predictions就是default box在各个类上的得分,也就是后面的logits通过softmax得到的结果,这样logits是什么就无需解释了,localisations是对default box的边框偏移预测结果,end_points是一个字典,里面储存着各个block的输出特征图。
下面来看net函数,发现它的核心只有一句话
|
|
而ssd_net是定义在跟net相同文件(ssd_vgg_300.py)中的一个函数,我们可以在下面找到它的代码
|
|
代码结构十分清晰,首先看前面定义网络的部分,这个定网络的定义与VGG16类似,只不过替换了其中某些层,原因在第一部分可以看到,可以看到在这一部分中每个block的输出被放进了end_points字典中。而后面则是根据特征图生成分类结果和偏移结果的部分,可以看到也是逐层进行并放到一个列表中的形式,每一层预测结果的获得都调用了ssd_multibox_layer函数,下面就看一下该函数的内容。
|
|
ssd_multibox_layer同样定义于ssd_vgg_300.py中,可以看到一开始对normalization值进行了判断,此处就是SSDParams中normalizations的作用,在SSD中由于第一个要提取特征层较浅,其norm较大,所以要对其进行沿channel方向的l2_normalize,而其他层无需进行此操作,代码中也仅是判断了normalization的值是否大于0,所以在normalizations中第一个值大于0,其他都小于0,20和-1无实际含义。
下面则是对location的计算,首先使用了一个3*3卷积,通道数是每个中心default box的个数乘4,代表y,x,w,h四个偏移,从而得到了每个中心的边框偏移的结果,此处又进行了一个reshape操作,其中tensor_shape得到loc_pred的形状,再通过切片将最后一维去掉,再加上两维,分别是每个中心default box的个数,和4,这样就得到了[batch_size,size[0],size[1],num_anchors,4]的tensor。以第二个特征层为例,loc_pred的形状为[batch_size,19,19,6,4],同理可以得到第二个特征层的cls_pred的形状为[batch_size,19,19,6,21]。
五、loss的计算
SSD的loss是一个multitask的loss,包含分类损失和定位损失,公式如下所示

所有此处所有的loss值均是对一张图而言的,式子中的$N$代表所有default box中正样本(有对应GT box)的数量,$\alpha$用于调整分类损失和定位损失的比例,下面看一下二者的具体计算。
首先看分类损失

式子中的$x_{ij}^p\in \{0,1\}$,类似于一个指示函数,当第i个default box与第j个GT box匹配并属于第p类时,$x_{ij}^p=1$,其他情况下$x_{ij}^p=0$。显然$c_i^p$就是之前得到的logits,所以整个式子其实就是一个交叉熵损失。
接下来看一下定位损失。
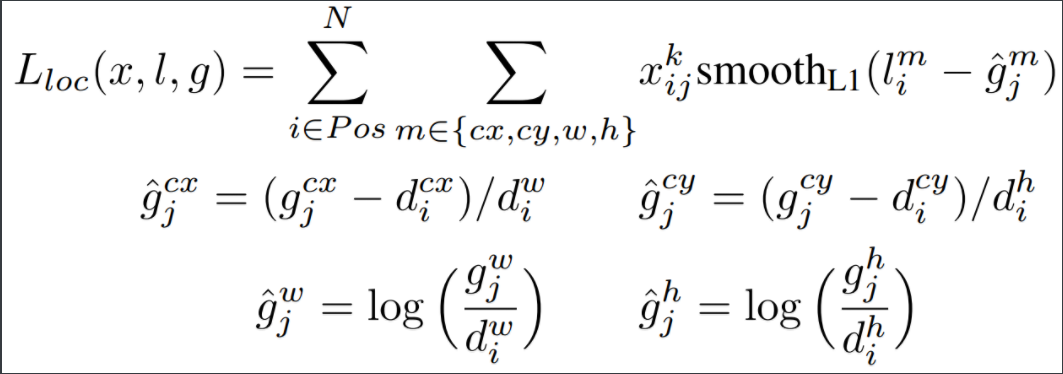
定位损失中的$x_{ij}^p$与分类损失中的含义相同,$\hat g_j^m$根据下面的定义,含义是default box到其对应GT box的偏移,$l_i^m$则是预测的偏移,对二者的误差使用了smooth L1 loss。
与之前的过程类似,可以在train_ssd_network.py中看到求loss的代码,如下
|
|
它调用了SSDNet的losses函数,只有一句话
|
|
它调用的ssd_losses是定义在相同文件中的函数,为了减少说明,使用了网上的有注释的版本,如下所示。
|
|
六、Data Augmentation
此处数据增强在tf中有很多辅助函数,而pytorch对ssd的实现中(amdegroot/ssd.pytorch)数据增强的部分都是使用的自己写的函数,先读HSV颜色空间相关内容,占坑。